Nipper - Robot AGV Logistiek
De Nipper is een zelfrijdende palletwagen die is ontwikkeld voor gebruik in een omgeving waar mensen actief zijn. De Nipper is een volledig zelfstandig opererende AGV die aan een WIFI dekking genoeg heeft. De Nipper heeft een laadtijd van slechts 30 minuten om daarna 4-5 uur continue te kunnen rijden. De Nipper AGV heeft een snelheid van 1 meter per seconde en een liftvermogen van 1000 kg.
De Nipper gebruikt natuurlijke structuren in de omgeving als referentie voor lokalisatie. Dit betekent dat het geen infrastructuur nodig heeft, zoals inductieve draden, magneten of reflectoren, om te navigeren.
De Nipper gebruikt natuurlijke structuren in de omgeving als referentie voor lokalisatie. Dit betekent dat het geen infrastructuur nodig heeft, zoals inductieve draden, magneten of reflectoren, om te navigeren.
|
De Nipper is een compact automatisch geleid voertuig voor onbemand intern pallet transport. Hij kan gemakkelijk pallets tot 1000 kg optillen en door nauwe ruimtes navigeren, wat de Nipper tot een veelzijdige en intelligente pallettruck maakt. Een ander voordeel is dat u na de training de Nipper zonder onze hulp kunt programmeren. Je weet de intelligente software te gebruiken om de routes van de Nipper eenvoudig aan te passen, meerdere Nippers aan het programma toe te voegen en bestaande commando's te wijzigen.
Onze Nipper voldoet aan de strengste veiligheidseisen. Er zijn hoogwaardige veiligheidscomponenten, zoals een 360°-scanner en Blue Spot, geïnstalleerd om ervoor te zorgen dat de Nipper veilig door bemande ruimtes kan navigeren. Een uitstekend voertuig dus voor gebruik in een productie- of magazijnomgeving. |
Door onze Nippers in te zetten op de werkvloer bespaart u fors op menskracht en verzekeringen en verhoogt u de productiviteit.
Optioneel De Nipper kan worden uitgerust met een objectscanner om schade door objecten die niet worden gedetecteerd in het beveiligingsscannerveld te voorkomen. |
|
Nipper AGV voordelen:
|

|
Veiligheid Nipper AVG
De Nipper voldoet aan de strengste veiligheidseisen. Er zijn hoogwaardige veiligheidscomponenten geïnstalleerd om ervoor te zorgen dat de Nipper veilig door bemande ruimtes kan navigeren.
De Nipper voldoet aan de volgende veiligheidsrichtlijnen:
Machinerichtlijn 2006/42/EG
EMC-richtlijn 2014/30/EU
Verder is het ontworpen en gebouwd volgens de volgende (Europese) normen en normen:
De Nipper voldoet aan de strengste veiligheidseisen. Er zijn hoogwaardige veiligheidscomponenten geïnstalleerd om ervoor te zorgen dat de Nipper veilig door bemande ruimtes kan navigeren.
De Nipper voldoet aan de volgende veiligheidsrichtlijnen:
Machinerichtlijn 2006/42/EG
EMC-richtlijn 2014/30/EU
Verder is het ontworpen en gebouwd volgens de volgende (Europese) normen en normen:
|
NEN-EN-ISO 12100:2010
Veiligheid van machines Algemene principes voor ontwerp Risicobeoordeling en risicovermindering NEN-EN-ISO 4413:2010 Hydraulisch vloeistofvermogen Algemene regels en veiligheidseisen voor systemen en hun componenten NEN-EN-ISO 13849-1:2016 Veiligheid van machines Veiligheidsgerelateerde onderdelen van besturingssystemen Deel 1: Algemene ontwerpprincipes NEN-EN-ISO 13850:2015 Veiligheid van machines Noodstopfunctie Principes voor ontwerp |
NEN-EN-IEC 60204-1:2006
Veiligheid van machines Elektrische uitrusting van machines Deel 1: Algemene vereisten NEN-EN 1525:1997 Veiligheid van industriële vrachtwagens Zelfrijdende vrachtwagens en hun systemen NEN-EN1175-1:1998+A1:2010nl Veiligheid van vrachtwagens voor industriële machines Elektrische vereisten Deel 1: Algemene vereisten voor op batterijen werkende vrachtwagens |
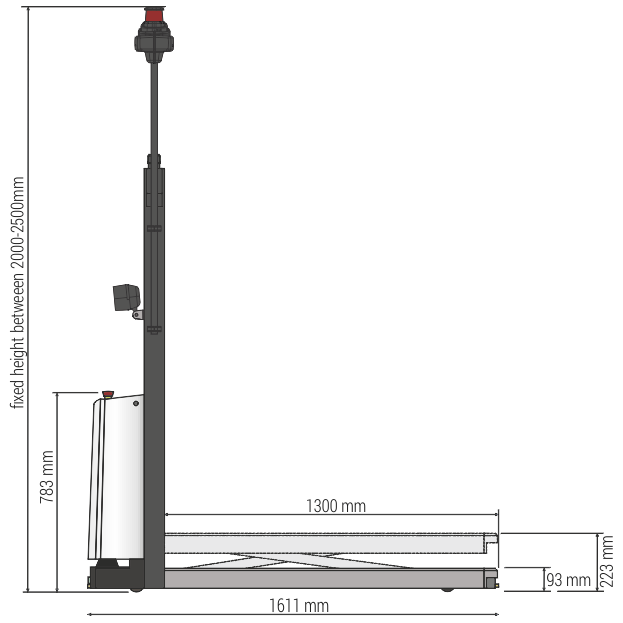
Maattekeningen

|
|
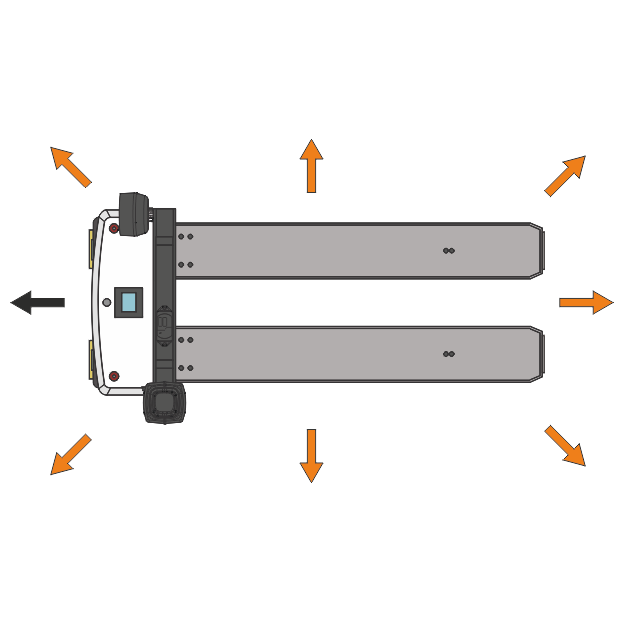
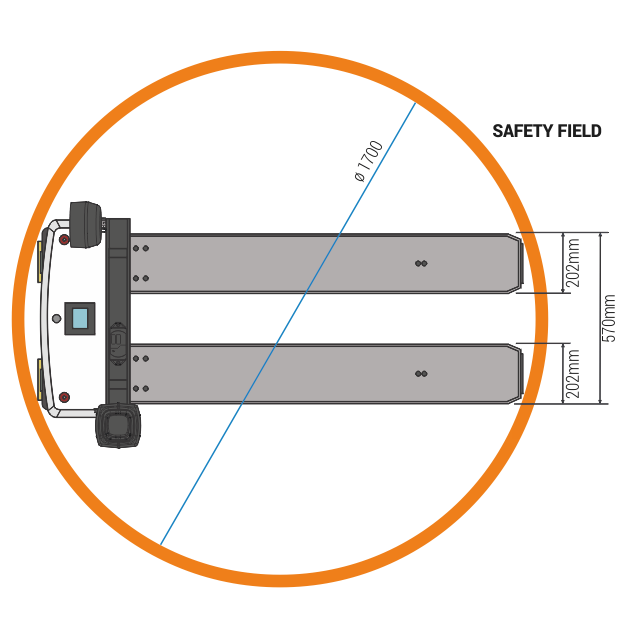
Bewegingsrichtingen en draaicirkel
|
|
TECHNISCHE SPECIFICATIES
PRESTATIEs
Voedingsspanning: |
24V |
Prestaties: |
LiFePO4 24V/2x420W/h |
Gebruiksduur: |
4-5 uur * |
Laadtijd: |
30min 20-80% |
Heffen: |
130 mm (laag 93 - hoog 223 mm) |
Maximale snelheid: |
1 m / s in hoofdrichting |
Eigen gewicht: |
229 k |
TTO: |
15.000 per uur |
MILIEU
Maximale omgevingstemperatuur: |
30°C |
Min. Omgevingstemperatuur: |
0°C |
Vochtigheid: |
95% geen condensatie |
voorwaarden werkvloer
Vloeromstandigheden: |
droog, vlak, niet stoffig |
Maximale hobbel: |
5 mm |
Maximale helling: |
3% |
PALLET BELASTING
Europallet: |
800x1200 mm |
Industriële pallet: |
1000x1200 mm (3 sleden) |
Max. Belasting: |
1000 kg |
Max. Load balancing voor / achter: |
60/40% |
Max. Belastingverdeling links / rechts: |
55/45% |
Max. Laadhoogte: |
2,3 meter |
|
** Andere pallets uitsluitend na vrijgave door de fabrikant
|

|
materiaal
Frame: |
staal |
Vorken: |
roestvrij staal SS304 |
AFWERKING oppervlak
Frame: |
witte parel met blanke polyurethaan coating Zwart RAL 9005 structuurafwerking |
Vorken: |
roestvrij staal SS304 |
Bevestigingsmiddelen: |
gegalvaniseerd staal |
Aangekochte onderdelen: |
Standaard leveranciersafwerking |
BEDIENING
Besturing Nipper: |
PLC gestuurd |
Taal: |
Engels |
Navigatie: |
navigatie met natuurlijke kenmerken |
HMI: |
3,5 ”touchscreen |
Fleet manager |
Bluebotics |
Visualisatie: |
Web based |
NAVIGATIE
Scanner: |
2D Lidar 360 ° navigatie scannen |
Scannertype: |
Pepperl + Fuchs 360 ° High Definition-scanning |
Scanhoogte: |
tussen 2 en 2,5 m boven vloerniveau |
oplaadstation
Oplaadstation: |
bestaat uit twee afzonderlijke laders (elk voor elke vork) |
Ingangsvoeding: |
2x 230V ~ 50Hz 3,2A |
Connector: |
2x EURO-connector |
Uitgangsvoeding: |
2x 29V-17A |
VEILIGHEID
- Sick S300 2d LIDAR veiligheidsscanner (hoofdrichting)
- Scanners in vorken voor achteruit rijden
- 2 mechanische bumpers voor vorken
- 2 mechanische bumpers achter op de vorken
- Koppelbegrenzing zijwaarts rijden (90 ° in hoofdrichting)
- Twee noodstops bovenop het voertuig
- Bluespot-waarschuwingslampje voor visualisatie op de vloer
- Oranje richtingaanwijzers
- Knipperend oranje licht voor bewustzijn op ooghoogte in bedieningsmodus
- Rode en groene LED in vorken (voor- en achterkant) voor rij-indicatie richting
- PLd (prestatieniveau d)
Veiligheidsopties
|
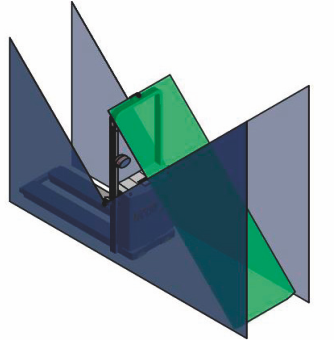
Object scannen
De ‘object scanning’ oplossing bestaat uit drie (3) Sick TIM320 scanners, deze zijn geïnstalleerd op de Nipper. Twee (2) scanners aan elke kant met een 2D verticaal vlak naast het voertuig en een (1) scanner bovenop het voertuig met een schuin naar beneden gericht veld. De Sick scanners hebben een gezichtsveld van 270 °. De blinde zijden van de scanners aan de zijkant zijn naar boven gericht. |
|
DOCUMENTATIE & REGELGEVING
Handleiding: |
Handleiding 1x digitaal |
Taal: |
Standaard Engels (binnen EU afhankelijk van land) |
Certificatie: |
CE |
Regelgeving |
|
2006/42 / EG |
Machinerichtlijn |
2014/30 / EU |
EMC-richtlijn |
NEN-EN-ISO 12100: 2010 |
Veiligheid van machines - Algemene principes voor ontwerp - Risicobeoordeling en risicoreductie |
NEN-EN-ISO 4413: 2010 |
Hydrauliekolie - Algemene regels en veiligheidseisen voor systemen en hun componenten |
NEN-EN-ISO 13849-1: 2016 |
Veiligheid van machines - Veiligheidsgerelateerde onderdelen van besturingssystemen - Deel 1: Algemene principes voor ontwerp |
NEN-EN-ISO 13850: 2015 |
Veiligheid van machines - Noodstopfunctie - Principes voor ontwerp |
NEN-EN-IEC 60204-1: 2006 |
Veiligheid van machines - Elektrische uitrusting van machines - Deel 1: Algemene eisen |
NEN-EN 1525: 1997 |
Veiligheid van industriële vrachtwagens - Zelfrijdende vrachtwagens en hun systemen |
NEN-EN1175-1: 1998 + A1: 2010en |
Veiligheid van vrachtwagens met industriële machines - Elektrische vereisten - Deel 1: Algemene eisen voor batterijen aangedreven vrachtwagens |
Software
|
Dankzij software en hardware technologie kan de Nipper zichzelf gelijktijdig positioneren en z’n omgeving in kaart brengen. Daarnaast zorgt SLAM technologie ervoor dat u geen infrastructuur nodig hebt om de Nipper aan te sturen, de Nipper navigeert zelfstandig door uw fabriek of magazijn. Met behulp van de Bluebotics software kunt u de Nipper onafhankelijk programmeren en opdrachten toevoegen of wijzigen. Daarnaast is het mogelijk om andere apparaten toe te voegen aan de Bluebotics software, zoals bijvoorbeeld een schoonmaakrobot. Op deze manier kunnen beide apparaten via dezelfde route navigeren. |
|